금속 및 기계가공에는 금속제품의 생산, 가공, 조립, 유지관리와 관련된 다양한 활동이 포함됩니다.
DUCO Cobot은 적재 및 하역, 자재 취급, 용접, 연마 및 기계 작동과 같은 작업을 수행할 수 있으며, 코봇을 사용하면 운영 효율성이 크게 향상되고 제품 품질이 향상되며 작업자의 부상을 감소 시킬 수 있습니다.
DUCO Cobot은 고객의 자동화 요구 사항과 강력한 시너지 효과를 발휘하며 지속적으로 글로벌 산업 혁신 기술의 발전을 의해 노력 하고 있습니다. 이러한 성과로 높은 작업 효율성과 정밀도를 갖추었고 금속 가공 및 가공 응용 프로그램을 실행하는 데 최적의 능력을 보유하고 있습니다.

단독 로봇 시스템을 활용하면 드릴링 머신 3대에 해당하는 작업량을 대체 할 수 있어 상당한 비용 절감과 작업공간 확보가 가능해집니다. 또한, 중단 없는 운영을 가능하게 하여 생산량을 효과적으로 증가 시킬 수 있습니다.
DUCO Cobot의 자동화는 테스트를 포함한 전공정에 대하여 무인화가 가능하도록 할 수 있어 작업 중 광범위하게 발생가능한 작업자와 장비 상호간에 관련된 잠재적인 위험을 제거하거나 완화 시킬 수 있습니다.


DUCO Cobot은 원클릭 시작으로 원활한 자동화 및 지능형 배치, 검사가 가능하여 효율성과 정확성을 높이는 동시에
고급 AI 및 로봇 공학을 통해 인적 오류를 최소화합니다. 지능형 알고리즘은 정확한 결함 식별 및 분석을 보장하여 사람의 개입을 최소화하면서 일관된 고품질 결과를 제공합니다.

팔레타이징
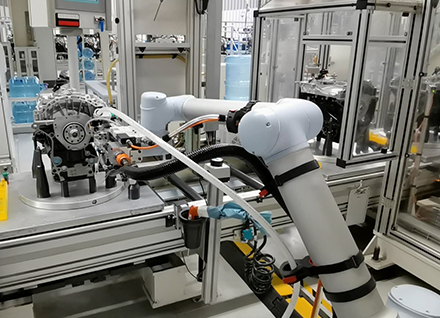
조립

품질검사
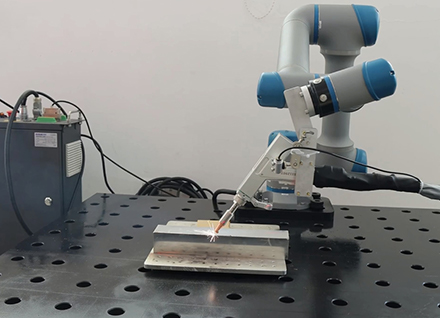
용접

도색